6) Milo – Vědecký Rover
a) sestav model robota, konstrukční plán ZDE
b) zapni na PC nebo tabletu aplikaci LEGO WeDo
c) klikni na clasroom projects
d) vyber lekci Milo´s
e) naprogramuj Rover dle pracovního listu ZDE
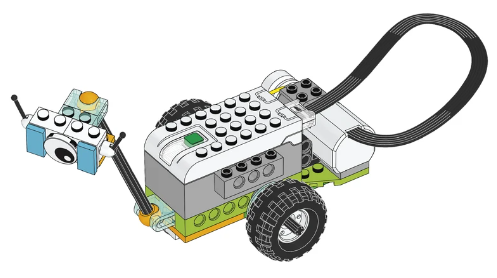

7) Pohybový senzor
a) sestav model robota, konstrukční plán ZDE
b) zapni na PC nebo tabletu aplikaci LEGO WeDo
c) klikni na clasroom projects
d) vyber lekci Milo´s Motion Sensor
e) naprogramuj rameno s pohybovým senzorem tak,
aby Milo zastavil před vzorkem rostliny, jakmile ji detekuje ( najde ) ZDE

8) Senzor náklonu
a) sestav model robota, konstrukční plán ZDE
b) zapni na PC nebo tabletu aplikaci LEGO WeDo
c) klikni na clasroom projects
d) vyber lekci Milo´s Tilt Sensor
e) naprogramuj senzor náklonu tak, aby Milo vyslal světelnou zprávu jakmile najde vzorek rostliny pohybem hlavy ZDE

9) Závora
- sestav model závory, konstrukční plán ZDE
b) zapni na PC nebo tabletu aplikaci LEGO WeDo
c) klikni na clasroom projects
d) vyber lekci Závora
e) programuj závoru dle pracovního listu ZDE
– sestav program, který zvedne závoru
– musíš ji včas zastavit tlačítkem
– přidej program, který závoru zase zavře
– naprogramujte závoru tak, aby se otevřela, chvíli zůstala a potom se opět zavřela
– přidej senzor vzdálenosti a naprogramuj ho tak, aby se závora otevřela, když se k ní přiblíží auto

10) Speed / Rychlost
a) sestav závodní auto, konstrukční plán ZDE
b) zapni na PC nebo tabletu aplikaci LEGO WeDo
c) klikni na clasroom projects
d) vyber lekci Speed
e) naprogramuj závodní auto dle pracovního listu ZDE
– sestav program tak, aby auto ujelo minimálně 2 metry
– zkuste předpovědět jak rychle pojede auto se zadním náhonem, předním náhonem a pohonem 4 x 4
– nastav rychlost zadních kol na 10 a několikrát vyzkoušej, jak auto pojede
– to stejné zkus pouze s předními koly
